
На прошлой неделе вышло видео, сравнивающее два подхода к автономному вождению: камеры и LiDAR. Видео было забавным, как это обычно бывает с видео на YouTube, но последствия этого оказались совсем не забавными, поскольку практически все упустили суть самого видео.
Видео было опубликовано ютубером Марком Роубером, который обычно занимается научными и инженерными трюками. По сути, это было сравнительное тестирование системы автопилота/FSD Tesla, использующей только камеры, и систем LiDAR, где автомобиль с LiDAR использовал систему Luminar.
Эксперимент проверял, смогут ли автомобили среагировать на ребенка на дороге в шести условиях: стоящий, внезапно выбегающий на дорогу, в тумане, в дожде, при ярком свете и стоящий за комичной стеной в стиле Вайла Э. Койота с нарисованной на ней дорогой.
Очевидно, что одно из этих условий отличается от остальных. Пять тестов дали нам потенциально значимые результаты об окружающем мире, а шестой был просто для развлечения.

Результаты тестов показали, что LiDAR в целом показал лучшие результаты, в основном благодаря лучшей производительности в тумане и дожде. Но каждый автомобиль показал впечатляющие результаты в некоторых тестах — например, при внезапном появлении ребенка перед автомобилем и при ярком свете, оба из которых казались довольно сложными (последнее особенно для системы машинного зрения).
Но даже в тестах на дождь и туман это были библейские уровни дождя и тумана. При более реалистичном легком тумане или легком дожде камеры, вероятно, показали бы лучшие результаты.
Есть и другие недостатки чисто визуальных систем: например, они могут испытывать трудности при взгляде на источники света (хотя в тесте на яркий свет они показали себя неплохо), и в прошлом у Tesla были проблемы с пересекающимися грузовиками (что приводило к смертям), или с трудностями различения путепроводов от рекламных щитов или неба — все это может быть решено с помощью правильной сверки данных с нескольких датчиков (еще одна проблема, с которой Tesla испытывала трудности).
Таким образом, эти результаты соответствуют техническим ограничениям камер по сравнению с LiDAR. Поскольку камеры пассивны, а LiDAR активен (излучает лазерные импульсы, отражающиеся от объектов), LiDAR способен «видеть сквозь» некоторые вещи, которые камеры не видят. LiDAR похож на радар, за исключением того, что LiDAR использует лазеры, а радар использует радиоволны (названия означают «обнаружение и определение дальности светом» и «обнаружение и определение дальности радиоволнами» соответственно).
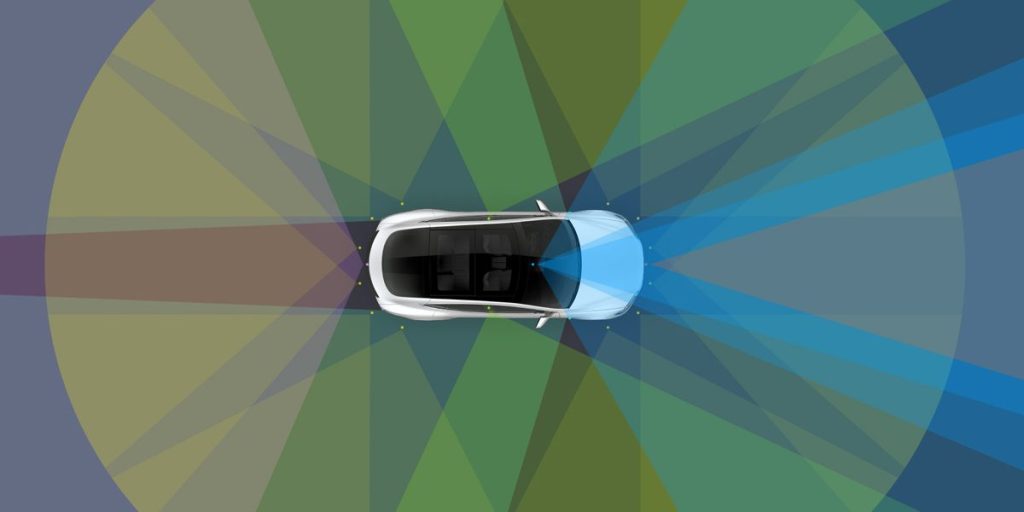
И об этом споре фанаты электромобилей слышали немало — это фундаментальное различие между подходом Tesla и подходом практически всех остальных. Tesla переходит на исключительно камеры, а большинство других компаний используют гибридный подход с комбинацией зрения, LiDAR, радаров, ультразвука и т. д.
На самом деле, Tesla раньше имела датчики, помимо камер: ранние модели Tesla оснащались радаром (не LiDAR) в дополнение к камерам. Но генеральный директор Илон Маск распорядился убрать радар (вопреки возражениям инженеров), поскольку он считает, что если люди могут водить с двумя глазами и без лазеров, то камеры должны справляться так же. (Однако он не одинок — Андре Карпати, бывший руководитель отдела искусственного интеллекта Tesla и уважаемый специалист в этой области, согласен, что подход исключительно на камерах является правильным).
Итак, тесты показали, что LiDAR обладает некоторыми возможностями, которых нет у камер, но это мы и так знали. Каковы преимущества исключительно камер?
Во-первых, очевидны преимущества в стоимости и сложности, поскольку требуется меньше датчиков. LiDAR был дорогим, хотя цены быстро падают, поэтому в будущем это может стать менее значимым фактором.
Кроме того, датчики LiDAR раньше были огромными вращающимися устройствами, крепящимися к автомобилям, но теперь они часто принимают форму «такси-шишки», которая немного похожа на такси-фонарь на крыше автомобиля, чуть выше лобового стекла — но это все равно ограничивает дизайн автомобиля, и многим не нравится такой вид.
Во-вторых, исключительно камерный подход потенциально может привести к более простому программному решению, поскольку вам не нужно сверять данные от нескольких методов датчиков, чтобы понять реальную обстановку перед вами.
Именно это сдерживало Tesla в ранние дни использования камер и радаров, поскольку возникало много ложных срабатываний и пропусков из-за необычных ситуаций (например, изогнутые металлические объекты, такие как банки из-под газировки, могли казаться больше, чем они есть, неподвижные транспортные средства было трудно различить и т. д.). Хотя данные были более надежными благодаря нескольким методам датчиков, интерпретировать их оказалось сложнее.
И, хотя это не является неотъемлемым преимуществом исключительно камерного подхода, конкретное преимущество для Tesla заключается в том, что у компании имеется ОГРОМНОЕ количество визуальных данных, которые она может использовать для обучения. Это большое преимущество перед всеми другими компаниями в несколько раз, поскольку миллионы Tesla ездили по дорогам, собирая данные годами, в то время как у таких компаний, как Waymo, всего несколько сотен автомобилей.
Итак, мы кое-что знаем о различиях в технологиях, их сильных и слабых сторонах, а также о давнем споре в отрасли, который мотивировал этот тест. Ничего из услышанного пока не кажется неразумным, и тест прошел примерно так, как и ожидалось. Однако остается открытым вопрос о том, какой путь развития является лучшим, хотя общий консенсус заключается в том, что больше данных от датчиков лучше, чем меньше, и что Tesla идет на рискованный шаг со своей системой исключительно камер.
Так почему же столько драмы?
Ну, это же интернет. Это причина номер один. Все остальные здесь гонятся за тем же, за чем и Роубер: за просмотрами. И, вероятно, это все, что нам нужно сказать, ладно, статья окончена, двигаемся дальше.
… Но нет, на самом деле. Настоящая драма заключается в разнице между «Автопилотом» и «Полным автопилотом» (Full Self-Driving), а также в поведении Tesla при активации или деактивации системы, особенно в отношении теста «Вайл Э. Койот».
Большинство обсуждений сосредоточено на этом конкретном тесте, потому что, ну, он самый забавный. В конце концов, Роубер — один из самых популярных ютуберов на планете, поэтому он должен кое-что знать о создании привлекательного видео (а вводное предложение видео — это нечто потрясающее):

Как сказал Роубер в самом первом предложении видео, во время этого теста его Tesla была на Автопилоте, а не на режиме Полного автопилота.
Часть критики сосредоточена на названии видео — «Can You Fool A Self Driving Car?» («Можно ли обмануть автомобиль с автопилотом?»), предполагая, что в тесте будет использоваться система «Self-Driving» от Tesla.
Это две разные системы, и FSD более сложен, чем Автопилот. Однако Автопилот давно разговорно называют автопилотом (часто к неудовольствию защитников Tesla), и хотя Tesla действительно называет FSD «автопилотом», он таковым вовсе не является. Обе системы классифицируются как «уровень 2», что означает, что водитель по-прежнему несет ответственность за автомобиль в любое время, даже если FSD может быть активирован в большем количестве ситуаций, чем Автопилот. И у многих Tesla больше Автопилота, чем FSD, поэтому имеет смысл тестировать более распространенный вариант.
LiDAR от Luminar может быть «автопилотом», поскольку существуют системы уровня 3+, использующие технологию датчиков Luminar (например, DRIVE PILOT от Mercedes).
Так что название технически не является некорректным, использует схожие разговорные выражения в обоих случаях и, в конце концов, это видео на YouTube, и все мы, надеюсь, знаем, как нужно создавать заголовки YouTube, чтобы соответствовать алгоритму Google, и, надеюсь, можем выйти за рамки заголовка и углубиться в первый кадр видео для более точного описания происходящего.
И мы уже обсуждали последнюю критику: скриншот, показывающий, что Роубер не активировал систему в видео. Это ранее задокументированное как «нормальное» поведение Автопилота, когда система отключается примерно за секунду до неизбежного столкновения. Скриншоты были сделаны в течение этой секунды. Роубер также ответил, упомянув, что в видео использовались разные дубли, чтобы сделать его более привлекательным, и опубликовал полные неотредактированные кадры в Twitter.
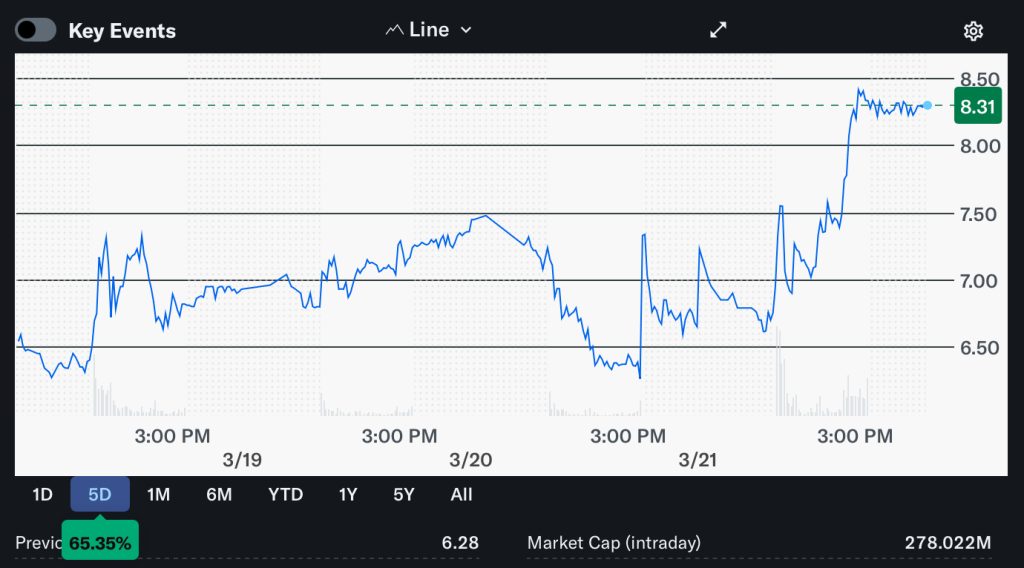
Еще одна критика касается последующего резкого роста акций Luminar (LAZR). Акции компании выросли с 5,05 до 8,35 за неделю после выхода видео, то есть на 65%. Это вызвало некоторое удивление, но я ожидаю, что основное объяснение заключается в том, что до выхода видео только очень преданные фанаты электромобилей/автопилотов знали о Luminar, а теперь он был представлен людям, связанным с самой торгуемой акцией на планете уже несколько лет подряд, TSLA. Это, естественно, приведет к огромному объему торгов для небольших акций (с ~0,03% рыночной капитализации TSLA).
Мы также видели, как другие пытались воссоздать видео, некоторые из них были более успешны для Tesla.
Но эти критические замечания в основном касаются теста с Вайлом Э. Койотом, который, как все признают, не является реалистичной ситуацией. Этот тест был для видео на YouTube — настоящая суть заключалась в других 5 тестах, которые действительно могли произойти в реальном мире.
И даже в этих 5 тестах люди слишком возбуждаются из-за показанных различий. Туман и вода были значительно сильнее, чем то, с чем обычно сталкиваются в реальной жизни. При более «реальных» погодных условиях камера могла бы работать достаточно хорошо (при условии, что камеры не будут закрыты водой или конденсатом — что, безусловно, является проблемой). А если непогода настолько плохая, как показано в видео — может быть, пора остаться дома (или, э-э, отправиться прямо в центр эвакуации при урагане).
В целом, это было похоже на забавный тест для видео на YouTube, которое простым способом описало технологию аудитории, которая о ней не слышала, было в целом точным относительно сильных и слабых сторон сравниваемых систем, но просто сильно преувеличило многие вещи «для контента».
Существует дискуссия о том, что в наши дни для привлечения внимания требуется все больше экстремальных трюков, но уровень реакции вышел далеко за рамки. Но, опять же, этого можно ожидать от всего, что появляется в интернете, особенно о Tesla.
И дискуссия о том, какой подход правильный, будет продолжаться — компании, такие как Luminar, считают, что LiDAR превосходит, а Tesla считает, что камер достаточно. Время покажет, кто прав, но большинство профессионалов в этой области склонны ставить на первое, а не на второе.
Заряжайте свой электромобиль дома, используя солнечные панели на крыше. Найдите надежного и конкурентоспособного установщика солнечных батарей рядом с вами на EnergySage, бесплатно. У них есть проверенные установщики, которые конкурируют за ваш бизнес, гарантируя высококачественные решения и экономию 20-30%. Это бесплатно, никаких звонков от продавцов, пока вы не выберете установщика. Сравните персонализированные предложения по солнечной энергии онлайн и получите консультацию от беспристрастных энергетических консультантов. Начните здесь. – реклама*
Лучший комментарий от Jayson Osmars
Понравилось 34 людям
Одна вещь, отсутствующая в тестировании, которую, я сомневаюсь, они могли бы воспроизвести, — это обычные снежные бури в северных штатах и Канаде.
Камеры быстро загрязнятся и покроются льдом. Затем грязь от слякоти и дорожной соли покроет автомобиль, закрывая камеры.
В зимних условиях LiDAR/радар — это лучший и самый безопасный способ для автопилота. Это бесспорно.
Посмотреть все комментарии